The HYDRAvision Project
1998-1999
The aim of this project was the development of a system for remote visual supervision of Electric Power Stations to provide visual feedback to remote operators of substations.
The system acquires, transmits and visualizes live video from the cameras located in the power plants in order to make possible the tele-operation from a control center (hundreds of kilometers away). Live video and audio is MPEG-compressed and transmitted via ATM optical fiber. Video streams can be stored in a database in the operator’s room. Last minutes video from any camera is stored automatically for image replay after any event.
System Structure
The system is structured in nodes that include the hardware and software necessary for the acquisition, visualization, transmission and reception of video images, and the transmission and reception of control signals for the different devices to be local or remotely controlled. Structure varies according to node characteristics. In the whol systems there are two basic classes of nodes: CCLs (local control centers), and CCI (Integrated Control Centre). The main task of the CCLs is acquiring and transmitting imagery and sound, while the CCI controls several of these CCLs and receives those multimedia data. The software consists of modules running in the workstations: Kernel, User Interface, Video and Audio Manager, Remote Link Manager, Video Database Manager. Configuration varies to fit node characteristics but same software runs in every node, configured to work with each combination of devices.
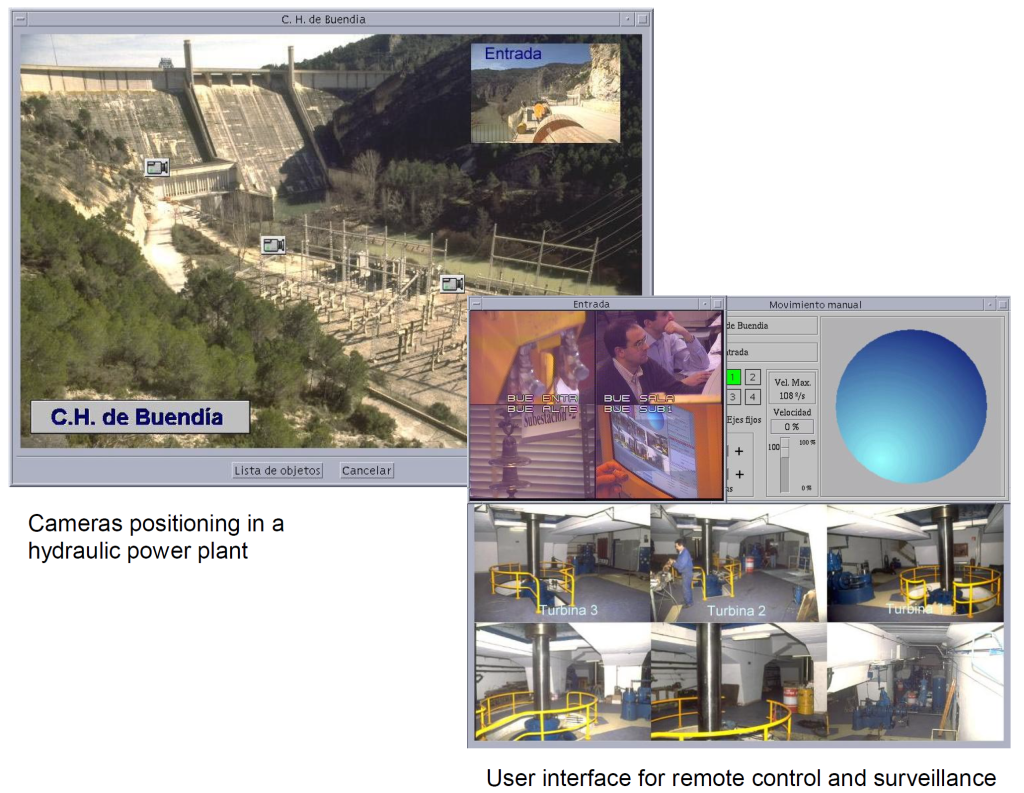
- CCL is the set of all local devices placed in a power plant (i.e. cameras, MPEG compressors, video and audio arrays) and the hardware and software needed to control them locally. Each CCL manage all its local devices. Control of these devices is done by a workstation via serial port. Video is transmitted via coaxial cable (composite pal) from cameras through video arrays and quadrant generator to compressor or to local video monitor. When working in local mode, user can control these local devices from the user interface running in the workstation and the video result is displayed in a window inside the user interface. When working in remote connection, local workstation receives control commands from a CCI and returns video compressed streams. A CCL may serve simultaneity video to up to four different CCIs.
- CCI works as a Central Node that can control all the local nodes associated to it by sending commands to the one-at-a-time remote controlled node. The way it works is the same as CCL (in fact, the same User Interface is used). Thus, the application has the same aspect used as a local or remote connection. As a matter of fact the most of the nodes are being configured as bi-directional. In other words, each node can control its own devices or remote control any other node, giving the operator the sense of being physically seated at the control room of the remote node.
Results
The main result of the project is to make possible the monitoring of all the operations usually needed in a power plant such as connection of high-tension cables, transformers, cut-out operations, etc. When the project stareted, those kinds of operations legally require the physical presence of a supervisor in order to make quite sure of the correct finalization of the maneuvering. Real time video will substitute this human supervisor as maneuvers can be remotely observed. Other useful features are surveillance, storage of imagery in order to be used to research the causes of a trouble, intercommunications between nodes to help task of maintenance, etc.