The HRTC Project
Hard Real-time CORBA
2002-2003 / FP5 IST

Control systems are software-intensive applications that are becoming extremely complex as new functionality is required from them. Modern control systems are typically software intensive distributed applications that can benefit from mainstream software technologies if these technologies are able to adequately address real-time requirements of control applications. One of such mainstream software technologies is middleware and, in particular, CORBA middleware. The problem for using common CORBA specifications in control applications is that they only address soft real-time issues but do not address the hard real-time (HRT) critical aspects of control systems, where communications delay and jitter can cause catastrophic failures.
The objective of the HRTC project was to identify requirements for the application of Real-time CORBA technology in control systems, the enhancement of the OMG CORBA specifications, and the implementation of a pluggable HRT transport (real time protocol for an ORB). The requirements were developed based on partners’ experience and on project-specific experiments in two testbeds, one in robot control and one in industrial system control. These requirements were then used to launch a specification process inside the OMG by means of the preparation of a RFI (Request for Information), a RFP (Request for Proposals) and collaboration with other groups in the elaboration of a proposal in response to the RFP.
PROJECT OBJECTIVES
Complexity is a real engineering challenge and distributed object technology has proved useful in dealing with this problem. One of the leading technologies in this field is the object request brokering model proposed by the CORBA specification from the Object Management Group. But, while present CORBA specifications do address real-time issues they deal only with soft real-time systems, and this is not enough for certain types of distributed systems (namely controllers) where timing properties are critical. The central objectives of HRTC were:
- to analyse and identify hard-real time requirements posed by CORBA based distributed control systems, and to develop theory/methodology for hard-real time applications;
- to enhance CORBA specifications with corresponding interfaces in order to build distributed control systems that have real-time requirements with hard timing constraints, and;
- to implement a CORBA pluggable HRT transport (real time protocol for an ORB) for running experiments.
DESCRIPTION OF WORK
In summary, it was the purpose of the project to build two experimental real-time CORBA control platforms to be able to specify what advances are needed in the OMG specifications; to construct a network transport with better temporal properties than the standard interoperation protocol IIOP; and to collaborate with the OMG in the elaboration of new specifications in this field. The focus of the project is control applications, i.e. applications where the information system closes a control loop to keep a target system in a controlled state. Timing is critical in this type of application due to dynamic effects that can be derived from delays or jitter due to the software/hardware path.
To achieve the above objectives with the said focus the project work was organized into five technical workpackages:
- WP 1: Domain engineering of CORBA-based control systems. The project will develop a sound, theoretical approach to methodologies and models to build hard real-time, software intensive, distributed, object-based control systems. It will produce a domain analysis of distributed object-based control systems, will define a set of reusable domain architectures and will define an engineering process specifically tailored to these applications.
- WP 2: Real-time interoperation protocols. The IIOP protocol used by ORBs to interoperate is not adequate for hard real-time applications. This WP will analyse protocols for distributed control and will develop a conceptual model for the precise specification of temporal properties of interfaces. It will further design and implement a new protocol for ORB interoperation to be used by ORBs by means of the extensible transports framework of the OMG.
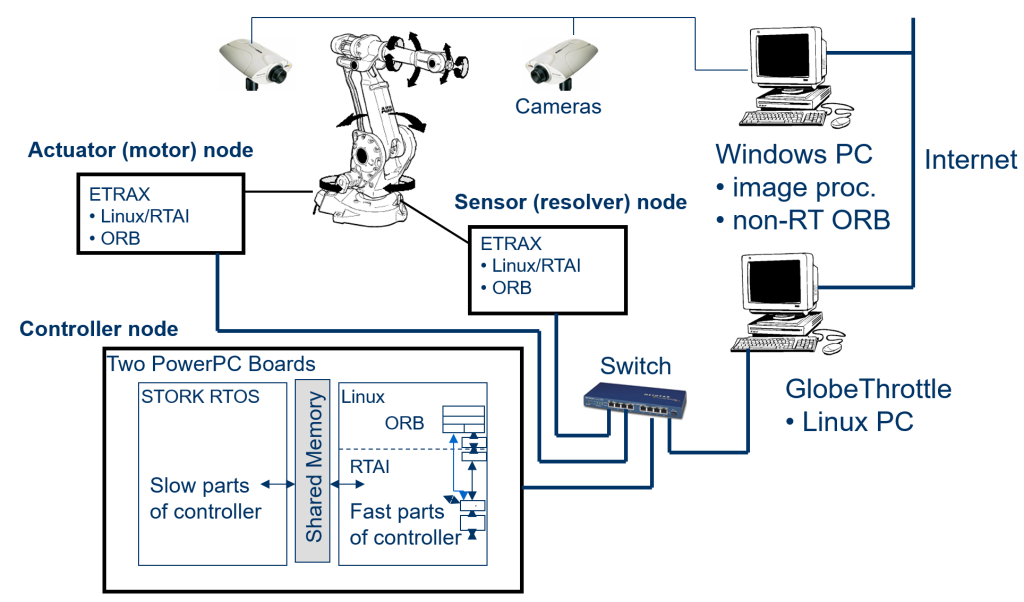
- WP 3: A distributed robot control testbed will be built, which will be used to elicit requirements and perform experiments in conditions of tight timing constraints. Experiments will be done using conventional IIOP and the new real-time protocol from WP2.
- WP 4: A distributed process control testbed will be built, which will be used to elicit requirements and perform experiments in conditions of systems heterogeneity and legacy integration. Experiments will be done using conventional IIOP and the new real-time protocol from WP 2.
- WP 5: Elaboration of CORBA specifications. The project will collaborate with OMG real-time task force to enhance CORBA specifications to deal with hard real-time requirements. In addition to the above technical work, the project will undertake targeted dissemination actions in order to achieve maximum impact of the project findings. These will in particular include contributions to the CORBA standardisation activities and the launch of a specification process inside the OMG.